https://medium.com/@jamesdell/weight-initialization-in-neural-networks-a-journey-from-the-basics-to-kaiming-954fb9b47c79
I’d like to
invite you to join me on an exploration through different approaches to
initializing layer weights in neural networks. Step-by-step, through
various short experiments and thought exercises, we’ll discover why
adequate weight initialization is so important in training deep neural
nets. Along the way we’ll cover various approaches that researchers have
proposed over the years, and finally drill down on what works best for
the contemporary network architectures that you’re most likely to be
working with.
The examples to follow come from my own re-implementation of a set of notebooks that Jeremy Howard covered in the latest version of fast.ai’s Deep Learning Part II course, currently being held this spring, 2019, at USF’s Data Institute.
Why Initialize Weights
The
aim of weight initialization is to prevent layer activation outputs
from exploding or vanishing during the course of a forward pass through a
deep neural network. If either occurs, loss gradients will either be
too large or too small to flow backwards beneficially, and the network
will take longer to converge, if it is even able to do so at all.
Matrix
multiplication is the essential math operation of a neural network. In
deep neural nets with several layers, one forward pass simply entails
performing consecutive matrix multiplications at each layer, between
that layer’s inputs and weight matrix. The product of this
multiplication at one layer becomes the inputs of the subsequent layer,
and so on and so forth.
For a quick-and-dirty example that illustrates this, let’s pretend that we have a vector x
that contains some network inputs. It’s standard practice when training
neural networks to ensure that our inputs’ values are scaled such that
they fall inside such a normal distribution with a mean of 0 and a
standard deviation of 1.

Let’s also pretend that we have a simple 100-layer network with no activations , and that each layer has a matrix a
that contains the layer’s weights. In order to complete a single
forward pass we’ll have to perform a matrix multiplication between layer
inputs and weights at each of the hundred layers, which will make for a
grand total of 100 consecutive matrix multiplications.
It
turns out that initializing the values of layer weights from the same
standard normal distribution to which we scaled our inputs is never a
good idea. To see why, we can simulate a forward pass through our
hypothetical network.

Whoa!
Somewhere during those 100 multiplications, the layer outputs got so
big that even the computer wasn’t able to recognize their standard
deviation and mean as numbers. We can actually see exactly how long that
took to happen.
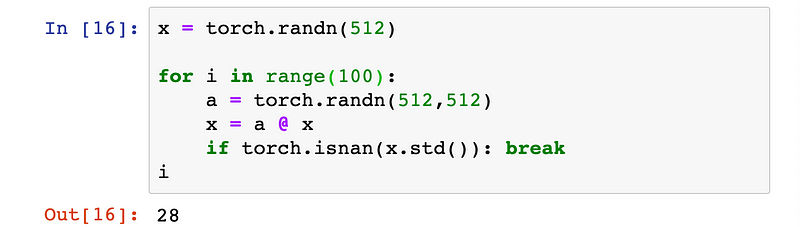
The activation outputs exploded within 29 of our network’s layers. We clearly initialized our weights to be too large.
Unfortunately,
we also have to worry about preventing layer outputs from vanishing. To
see what happens when we initialize network weights to be too
small — we’ll scale our weight values such that, while they still fall
inside a normal distribution with a mean of 0, they have a standard
deviation of 0.01.
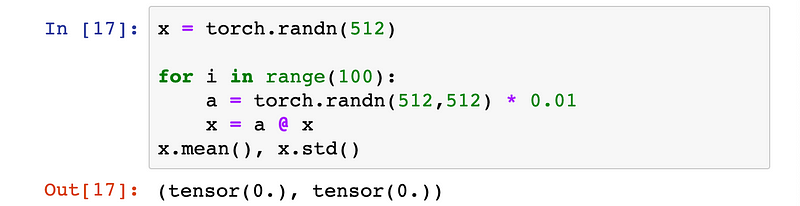
During the course of the above hypothetical forward pass, the activation outputs completely vanished.
To
sum it up, if weights are initialized too large, the network won’t
learn well. The same happens when weights are initialized too small.
How can we find the sweet spot?
Remember
that as mentioned above, the math required to complete a forward pass
through a neural network entails nothing more than a succession of
matrix multiplications. If we have an output y that is the product of a matrix multiplication between our input vector x and weight matrix a, each element i in y is defined as

where i is a given row-index of weight matrix a, k is both a given column-index in weight matrix a and element-index in input vector x, and n is the range or total number of elements in x. This can also be defined in Python as:
y[i] = sum([c*d for c,d in zip(a[i], x)])
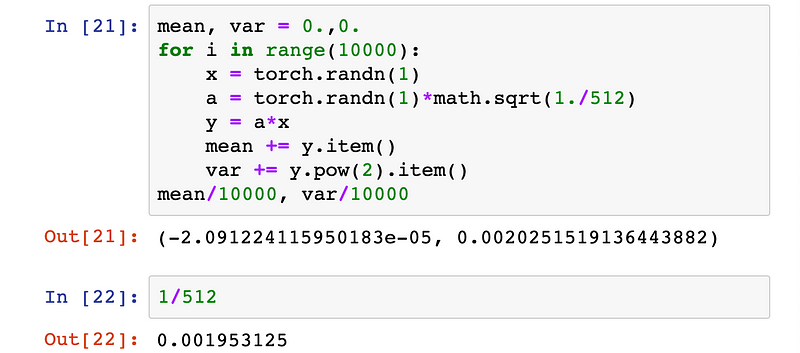
We can demonstrate that at a given layer, the matrix product of our inputs x and weight matrix a
that we initialized from a standard normal distribution will, on
average, have a standard deviation very close to the square root of the
number of input connections, which in our example is √512.
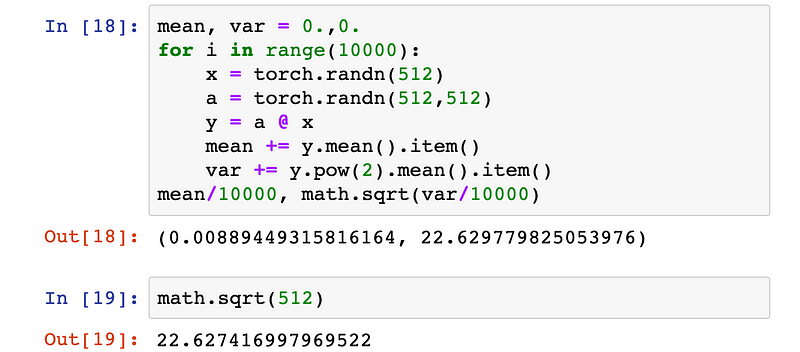
This property isn’t surprising if we view it in terms of how matrix multiplication is defined: in order to calculate y we sum 512 products of the element-wise multiplication of one element of the inputs x by one column of the weights a. In our example where both x and a
are initialized using standard normal distributions, each of these 512
products would have a mean of 0 and standard deviation of 1.
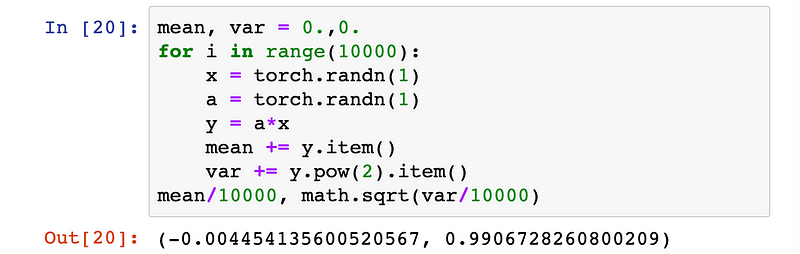
It then follows that the sum of these 512 products would have a mean of 0, variance of 512, and therefore a standard deviation of √512.
And
this is why in our example above we saw our layer outputs exploding
after 29 consecutive matrix multiplications. In the case of our
bare-bones 100-layer network architecture, what we’d like is for each
layer’s outputs to have a standard deviation of about 1. This
conceivably would allow us to repeat matrix multiplications across as
many network layers as we want, without activations exploding or
vanishing.
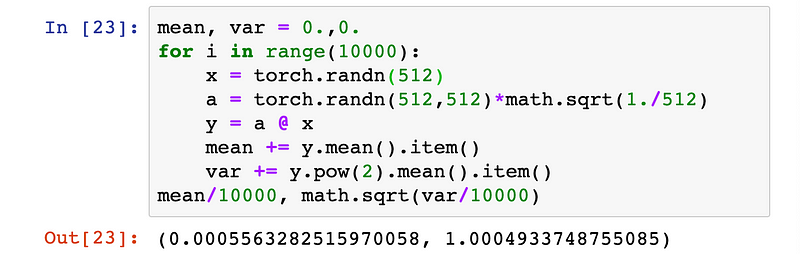
If we first scale the weight matrix a by dividing all its randomly chosen values by √512, the element-wise multiplication that fills in one element of the outputs y would now, on average, have a variance of only 1/√512.
This means that the standard deviation of the matrix y, which contains each of the 512 values that are generated by way of the matrix multiplication between inputs x and weights a, would be 1. Let’s confirm this experimentally.
Now
let’s re-run our quick-and-dirty 100-layer network. As before, we first
choose layer weights at random from standard normal distribution inside
[-1,1], but this time we scale those weights by 1/√n, where n is the number of network input connections at a layer, which is 512 in our example.
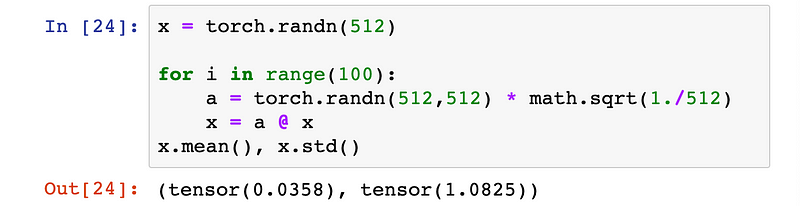
Success! Our layer outputs neither exploded nor vanished, even after 100 of our hypothetical layers.
While
at first glance it may seem like at this point we can call it a day,
real-world neural networks aren’t quite as simple as our first example
may seem to indicate. For the sake of simplicity, activation functions
were omitted. However, we’d never do this in real life. It’s thanks to
the placement of these non-linear activation functions at the tail end
of network layers, that deep neural nets are able create close
approximations of intricate functions that describe real-world
phenomena, which can then be used to generate astoundingly impressive
predictions, such as the classification of handwriting samples.
Xavier Initialization
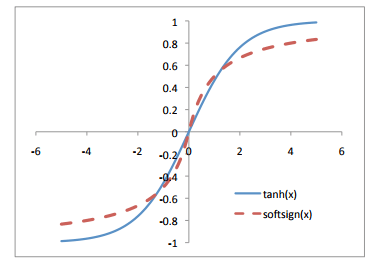
Up
until a few years ago, most commonly used activation functions were
symmetric about a given value, and had ranges that asymptotically
approached values that were plus/minus a certain distance from this
midpoint. The hyperbolic tangent and softsign functions exemplify this
class of activations.
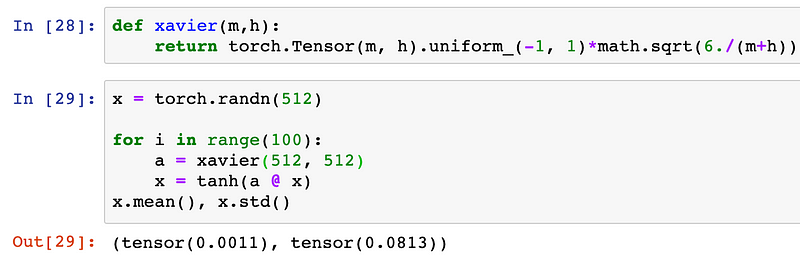
We’ll
add a hyperbolic tangent activation function after each layer our
hypothetical 100-layer network, and then see what happens when we use
our home-grown weight initialization scheme where layer weights are
scaled by 1/√n.
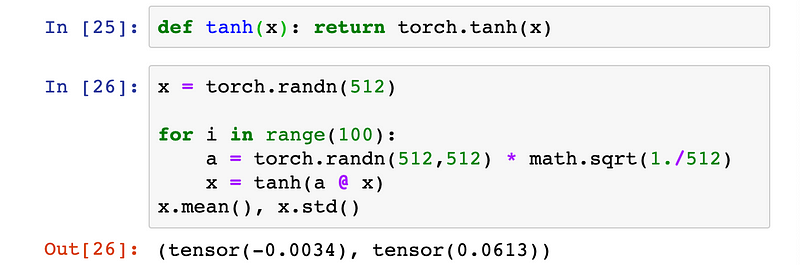
The
standard deviation of activation outputs of the 100th layer is down to
about 0.06. This is definitely on the small side, but at least
activations haven’t totally vanished!
As
intuitive as the journey to discovering our home-grown weight init
strategy may now seem in retrospect, you may be surprised to hear that
as recently as 2010, this was not the conventional approach for
initializing weight layers.
When Xavier Glorot and Yoshua Bengio published their landmark paper titled Understanding the difficulty of training deep feedforward neural networks, the “commonly used heuristic” to which they compared their experiments was that of initializing weights from a uniform distribution in [-1,1] and then scaling by 1/√n.
It turns out this “standard” approach doesn’t actually work that well.
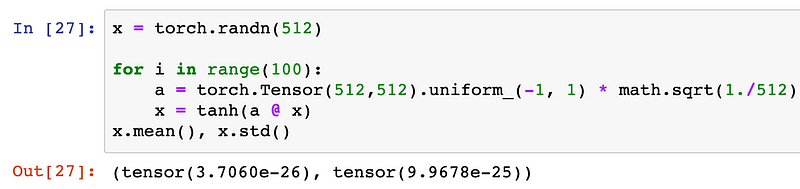
Re-running
our 100-layer tanh network with “standard” weight initialization caused
activation gradients to become infinitesimally small — they’re just
about as good as vanished.
This
poor performance is actually what spurred Glorot and Bengio to propose
their own weight initialization strategy, which they referred to as
“normalized initialization” in their paper, and which is now popularly
termed “Xavier initialization.”
Xavier initialization sets a layer’s weights to values chosen from a random uniform distribution that’s bounded between

where nᵢ is the number of incoming network connections, or “fan-in,” to the layer, and nᵢ₊₁ is the number of outgoing network connections from that layer, also known as the “fan-out.”
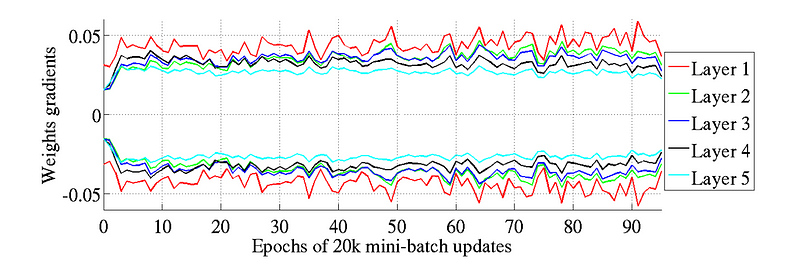
Glorot
and Bengio believed that Xavier weight initialization would maintain
the variance of activations and back-propagated gradients all the way up
or down the layers of a network. In their experiments they observed
that Xavier initialization enabled a 5-layer network to maintain near
identical variances of its weight gradients across layers.
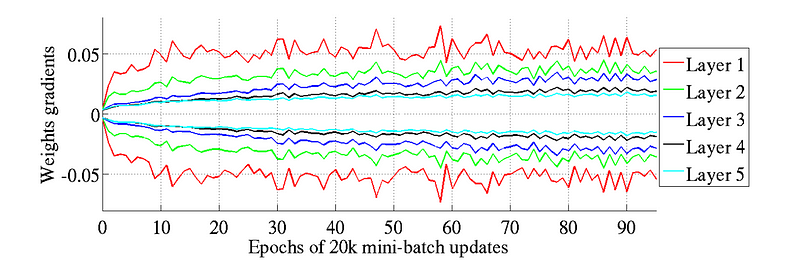
Conversely,
it turned out that using “standard” initialization brought about a much
bigger gap in variance between weight gradients at the network’s lower
layers, which were higher, and those at its top-most layers, which were
approaching zero.
To
drive the point home, Glorot and Bengio demonstrated that networks
initialized with Xavier achieved substantially quicker convergence and
higher accuracy on the CIFAR-10 image classification task.
Let’s re-run our 100-layer tanh network once more, this time using Xavier initialization:
In
our experimental network, Xavier initialization performs pretty
identical to the home-grown method that we derived earlier, where we
sampled values from a random normal distribution and scaled by the
square root of number of incoming network connections, n.
Kaiming Initialization
Conceptually,
it makes sense that when using activation functions that are symmetric
about zero and have outputs inside [-1,1], such as softsign and tanh,
we’d want the activation outputs of each layer to have a mean of 0 and a
standard deviation around 1, on average. This is precisely what our
home-grown method and Xavier both enable.
But
what if we’re using ReLU activation functions? Would it still make
sense to want to scale random initial weight values in the same way?
To
see what would happen, let’s use a ReLU activation instead of tanh in
one of our hypothetical network’s layers and observe the expected
standard deviation of its outputs.
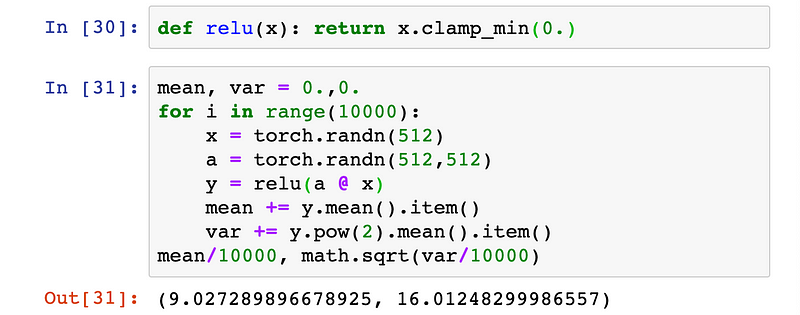
It
turns out that when using a ReLU activation, a single layer will, on
average have standard deviation that’s very close to the square root of
the number of input connections, divided by the square root of two, or √512/√2 in our example.

Scaling the values of the weight matrix a by this number will cause each individual ReLU layer to have a standard deviation of 1 on average.
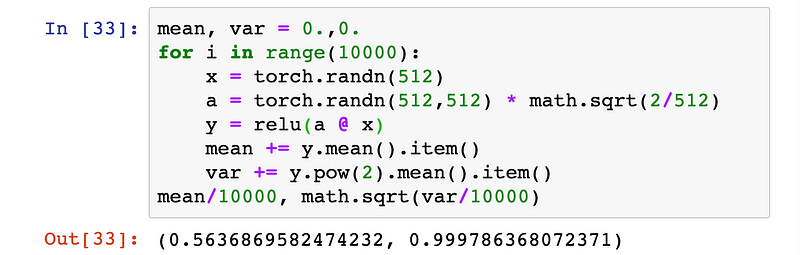
As
we showed before, keeping the standard deviation of layers’ activations
around 1 will allow us to stack several more layers in a deep neural
network without gradients exploding or vanishing.
This
exploration into how to best initialize weights in networks with
ReLU-like activations is what motivated Kaiming He et. al. to propose their own initialization scheme that’s tailored for deep neural nets that use these kinds of asymmetric, non-linear activations.
In
their 2015 paper, He et. al. demonstrated that deep networks (e.g. a
22-layer CNN) would converge much earlier if the following input weight
initialization strategy is employed:
- Create a tensor with the dimensions appropriate for a weight matrix at a given layer, and populate it with numbers randomly chosen from a standard normal distribution.
- Multiply each randomly chosen number by √2/√n where n is the number of incoming connections coming into a given layer from the previous layer’s output (also known as the “fan-in”).
- Bias tensors are initialized to zero.
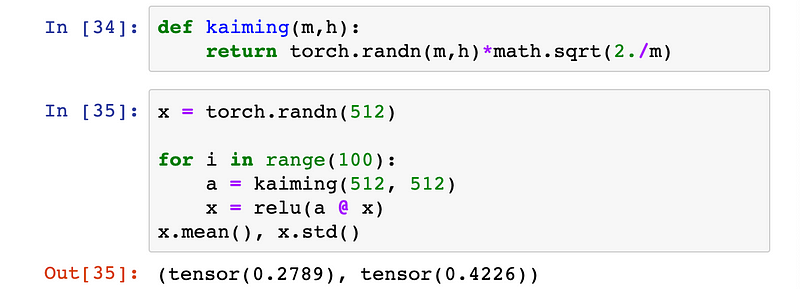
We
can follow these directions to implement our own version of Kaiming
initialization and verify that it can indeed prevent activation outputs
from exploding or vanishing if ReLU is used at all layers of our
hypothetical 100-layer network.
As a final comparison, here’s what would happen if we were to use Xavier initialization, instead.
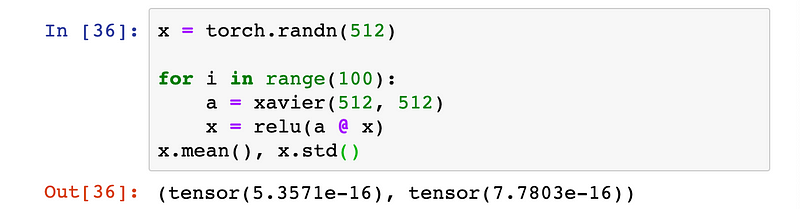
Ouch! When using Xavier to initialize weights, activation outputs have almost completely vanished by the 100th layer!
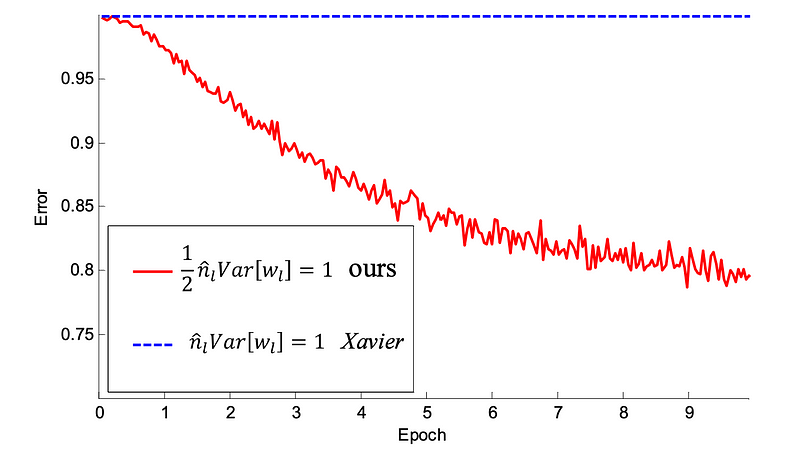
Incidentally,
when they trained even deeper networks that used ReLUs, He et. al.
found that a 30-layer CNN using Xavier initialization stalled completely
and didn’t learn at all. However, when the same network was initialized
according to the three-step procedure outlined above, it enjoyed
substantially greater convergence.
The
moral of the story for us is that any network we train from scratch,
especially for computer vision applications, will almost certainly
contain ReLU activation functions and be several layers deep. In such
cases, Kaiming should be our go-to weight init strategy.
Yes, You Too Can Be a Researcher
Even
more importantly, I’m not ashamed to admit that I felt intimidated when
I saw the Xavier and Kaiming formulas for the first time. What with
their respective square roots of six and two, part of me couldn’t help
but feel like they must have been the result of some sort of oracular
wisdom I couldn’t hope to fathom on my own. And let’s face it, sometimes
the math in deep learning papers can look a lot like hieroglyphics, except with no Rosetta Stone to aid in translation.
But
I think the journey we took here showed us that this knee-jerk response
of feeling of intimidated, while wholly understandable, is by no means
unavoidable. Although the Kaiming and (especially) the Xavier papers do
contain their fair share of math, we saw firsthand how experiments,
empirical observation, and some straightforward common sense were enough
to help derive the core set of principals underpinning what is
currently the most widely-used weight initialization scheme.
Alternately put: when in doubt, be courageous, try things out, and see what happens!
No comments:
Post a Comment