This mostly cites papers from Berkeley, Google Brain, DeepMind, and OpenAI from the past few years, because that work is most visible to me. I’m almost certainly missing stuff from older literature and other institutions, and for that I apologize - I’m just one guy, after all.
Introduction
Once, on Facebook, I made the following claim.Whenever someone asks me if reinforcement learning can solve their problem, I tell them it can’t. I think this is right at least 70% of the time.
Unfortunately, it doesn’t really work yet.
Now, I believe it can work. If I didn’t believe in reinforcement learning, I wouldn’t be working on it. But there are a lot of problems in the way, many of which feel fundamentally difficult. The beautiful demos of learned agents hide all the blood, sweat, and tears that go into creating them.
Several times now, I’ve seen people get lured by recent work. They try deep reinforcement learning for the first time, and without fail, they underestimate deep RL’s difficulties. Without fail, the “toy problem” is not as easy as it looks. And without fail, the field destroys them a few times, until they learn how to set realistic research expectations.
This isn’t the fault of anyone in particular. It’s more of a systemic problem. It’s easy to write a story around a positive result. It’s hard to do the same for negative ones. The problem is that the negative ones are the ones that researchers run into the most often. In some ways, the negative cases are actually more important than the positives.
In the rest of the post, I explain why deep RL doesn’t work, cases where it does work, and ways I can see it working more reliably in the future. I’m not doing this because I want people to stop working on deep RL. I’m doing this because I believe it’s easier to make progress on problems if there’s agreement on what those problems are, and it’s easier to build agreement if people actually talk about the problems, instead of independently re-discovering the same issues over and over again.
I want to see more deep RL research. I want new people to join the field. I also want new people to know what they’re getting into.
Before getting into the rest of the post, a few remarks.
-
I cite several papers in this post. Usually, I cite the paper for its
compelling negative examples, leaving out the positive ones. This doesn’t
mean I don’t like the paper. I like these papers - they’re worth a read, if
you have the time.
-
I use “reinforcement learning” and “deep reinforcement learning”
interchangeably, because in my day-to-day, “RL” always implicitly
means deep RL.
I am criticizing the empirical behavior of deep reinforcement
learning, not reinforcement learning in general.
The papers I cite usually represent the agent with a deep neural net.
Although the empirical criticisms may apply to linear RL or tabular RL, I’m not
confident they generalize to smaller problems.
The hype around deep RL is driven by the promise of applying RL to large, complex,
high-dimensional environments where good function approximation is necessary.
It is that hype in particular that needs to be addressed.
-
This post is structured to go from pessimistic to optimistic.
I know it’s a bit long, but I’d appreciate it if you would take the time to
read the entire post before replying.
Deep Reinforcement Learning Can Be Horribly Sample Inefficient
The most well-known benchmark for deep reinforcement learning is Atari. As shown in the now-famous Deep Q-Networks paper, if you combine Q-Learning with reasonably sized neural networks and some optimization tricks, you can achieve human or superhuman performance in several Atari games.Atari games run at 60 frames per second. Off the top of your head, can you estimate how many frames a state of the art DQN needs to reach human performance?
The answer depends on the game, so let’s take a look at a recent Deepmind paper, Rainbow DQN (Hessel et al, 2017). This paper does an ablation study over several incremental advances made to the original DQN architecture, demonstrating that a combination of all advances gives the best performance. It exceeds human-level performance on over 40 of the 57 Atari games attempted. The results are displayed in this handy chart.
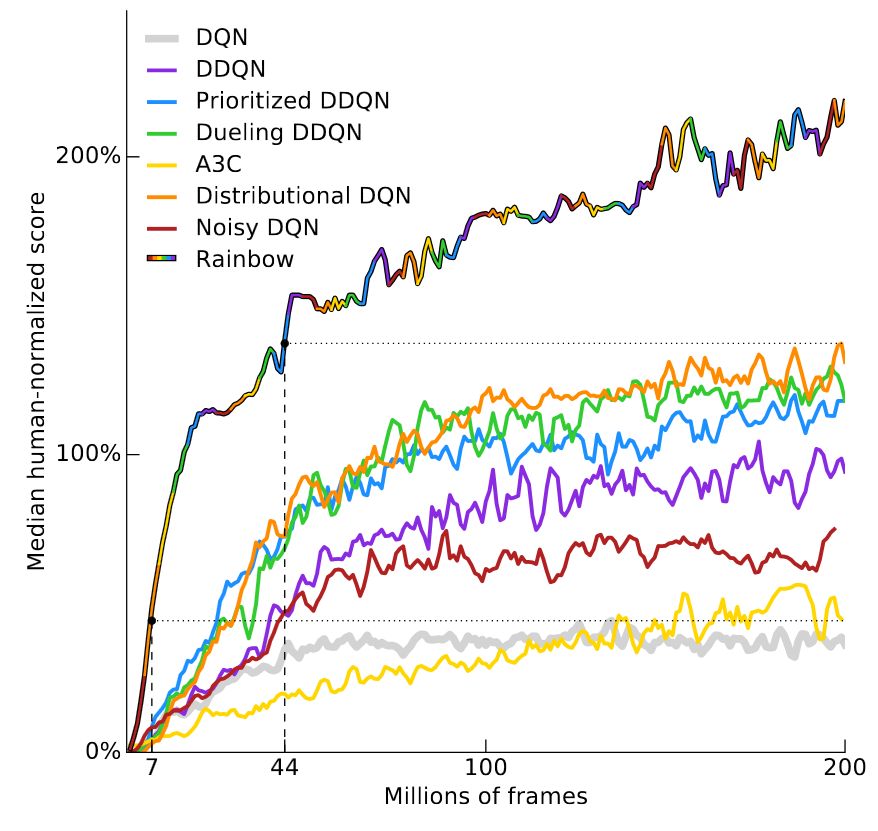
Mind you, 18 million frames is actually pretty good, when you consider that the previous record (Distributional DQN (Bellemare et al, 2017)) needed 70 million frames to hit 100% median performance, which is about 4x more time. As for the Nature DQN (Mnih et al, 2015), it never hits 100% median performance, even after 200 million frames of experience.
The planning fallacy says that finishing something usually takes longer than you think it will. Reinforcement learning has its own planning fallacy - learning a policy usually needs more samples than you think it will.
This is not an Atari-specific issue. The 2nd most popular benchmark is the MuJoCo benchmarks, a set of tasks set in the MuJoCo physics simulator. In these tasks, the input state is usually the position and velocity of each joint of some simulated robot. Even without having to solve vision, these benchmarks take between 105 to 107 steps to learn, depending on the task. This is an astoundingly large amount of experience to control such a simple environment.
The DeepMind parkour paper (Heess et al, 2017), demoed below, trained policies by using 64 workers for over 100 hours. The paper does not clarify what “worker” means, but I assume it means 1 CPU.
At the same time, the fact that this needed 6400 CPU hours is a bit disheartening. It’s not that I expected it to need less time…it’s more that it’s disappointing that deep RL is still orders of magnitude above a practical level of sample efficiency.
There’s an obvious counterpoint here: what if we just ignore sample efficiency? There are several settings where it’s easy to generate experience. Games are a big example. But, for any setting where this isn’t true, RL faces an uphill battle, and unfortunately, most real-world settings fall under this category.
If You Just Care About Final Performance, Many Problems are Better Solved by Other Methods
When searching for solutions to any research problem, there are usually trade-offs between different objectives. You can optimize for getting a really good solution for that research problem, or you can optimize for making a good research contribution. The best problems are ones where getting a good solution requires making good research contributions, but it can be hard to find approachable problems that meet that criteria.For purely getting good performance, deep RL’s track record isn’t that great, because it consistently gets beaten by other methods. Here is a video of the MuJoCo robots, controlled with online trajectory optimization. The correct actions are computed in near real-time, online, with no offline training. Oh, and it’s running on 2012 hardware. (Tassa et al, IROS 2012).
The difference is that Tassa et al use model predictive control, which gets to perform planning against a ground-truth world model (the physics simulator). Model-free RL doesn’t do this planning, and therefore has a much harder job. On the other hand, if planning against a model helps this much, why bother with the bells and whistles of training an RL policy?
In a similar vein, you can easily outperform DQN in Atari with off-the-shelf Monte Carlo Tree Search. Here are baseline numbers from Guo et al, NIPS 2014. They compare the scores of a trained DQN to the scores of a UCT agent (where UCT is the standard version of MCTS used today.)


Reinforcement learning can theoretically work for anything, including environments where a model of the world isn’t known. However, this generality comes at a price: it’s hard to exploit any problem-specific information that could help with learning, which forces you to use tons of samples to learn things that could have been hardcoded.
The rule-of-thumb is that except in rare cases, domain-specific algorithms work faster and better than reinforcement learning. This isn’t a problem if you’re doing deep RL for deep RL’s sake, but I personally find it frustrating when I compare RL’s performance to, well, anything else. One reason I liked AlphaGo so much was because it was an unambiguous win for deep RL, and that doesn’t happen very often.
This makes it harder for me to explain to laypeople why my problems are cool and hard and interesting, because they often don’t have the context or experience to appreciate why they’re hard. There’s an explanation gap between what people think deep RL can do, and what it can really do. I’m working in robotics right now. Consider the company most people think of when you mention robotics: Boston Dynamics.
Reinforcement Learning Usually Requires a Reward Function
Reinforcement learning assumes the existence of a reward function. Usually, this is either given, or it is hand-tuned offline and kept fixed over the course of learning. I say “usually” because there are exceptions, such as imitation learning or inverse RL, but most RL approaches treat the reward as an oracle.Importantly, for RL to do the right thing, your reward function must capture exactly what you want. And I mean exactly. RL has an annoying tendency to overfit to your reward, leading to things you didn’t expect. This is why Atari is such a nice benchmark. Not only is it easy to get lots of samples, the goal in every game is to maximize score, so you never have to worry about defining your reward, and you know everyone else has the same reward function.
This is also why the MuJoCo tasks are popular. Because they’re run in simulation, you have perfect knowledge of all object state, which makes reward function design a lot easier.
In the Reacher task, you control a two-segment arm, that’s connected to a central point, and the goal is to move the end of the arm to a target location. Below is a video of a successfully learned policy.
By itself, requiring a reward function wouldn’t be a big deal, except…
Reward Function Design is Difficult
Making a reward function isn’t that difficult. The difficulty comes when you try to design a reward function that encourages the behaviors you want while still being learnable.In the HalfCheetah environment, you have a two-legged robot, restricted to a vertical plane, meaning it can only run forward or backward.
This is a shaped reward, meaning it gives increasing reward in states that are closer to the end goal. This is in contrast to sparse rewards, which give reward at the goal state, and no reward anywhere else. Shaped rewards are often much easier to learn, because they provide positive feedback even when the policy hasn’t figured out a full solution to the problem.
Unfortunately, shaped rewards can bias learning. As said earlier, this can lead to behaviors that don’t match what you want. A good example is the boat racing game, from an OpenAI blog post. The intended goal is to finish the race. You can imagine that a sparse reward would give +1 reward for finishing under a given time, and 0 reward otherwise.
The provided reward gives points for hitting checkpoints, and also gives reward for collecting powerups that let you finish the race faster. It turns out farming the powerups gives more points than finishing the race.
Then I started writing this blog post, and realized the most compelling video of misspecified reward was the boat racing video. And since then, that video’s been used in several presentations bringing awareness to the problem. So, okay, I’ll begrudgingly admit this was a good blog post.
RL algorithms fall along a continuum, where they get to assume more or less knowledge about the environment they’re in. The broadest category, model-free RL, is almost the same as black-box optimization. These methods are only allowed to assume they are in an MDP. Otherwise, they are given nothing else. The agent is simply told that this gives +1 reward, this doesn’t, and it has to learn the rest on its own. And like black-box optimization, the problem is that anything that gives +1 reward is good, even if the +1 reward isn’t coming for the right reasons.
A classic non-RL example is the time someone applied genetic algorithms to circuit design, and got a circuit where an unconnected logic gate was necessary to the final design.
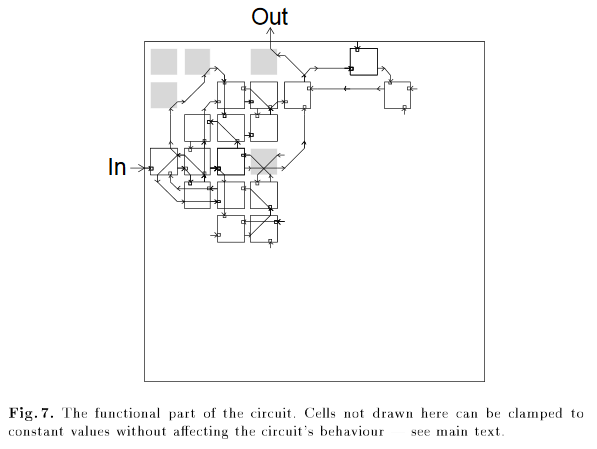
The gray cells are required to get correct behavior, including the one in the top-left corner,
even though it’s connected to nothing.
From “An Evolved Circuit, Intrinsic in Silicon, Entwined with Physics”
For a more recent example, see this
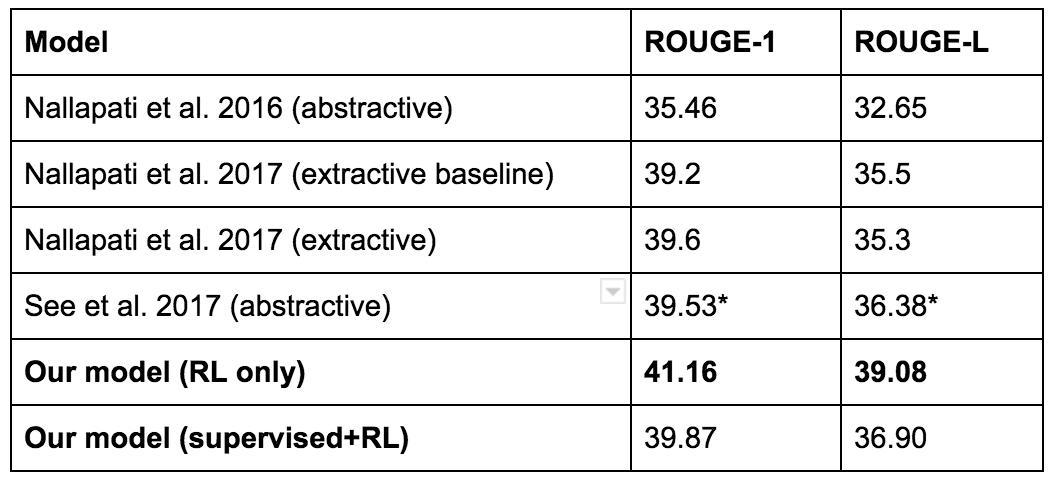
2017 blog post from Salesforce.
Their goal is text summarization.
Their baseline model is trained with supervised learning, then evaluated with
an automated metric called ROUGE. ROUGE is non-differentiable, but RL can
deal with non-differentiable rewards, so they tried applying RL to optimize
ROUGE directly. This gives high ROUGE (hooray!), but it doesn’t actually
give good summaries. Here’s an example.Button was denied his 100th race for McLaren after an ERS prevented him from making it to the start-line. It capped a miserable weekend for the Briton. Button has out-qualified. Finished ahead of Nico Rosberg at Bahrain. Lewis Hamilton has. In 11 races. . The race. To lead 2,000 laps. . In. . . And.So, despite the RL model giving the highest ROUGE score…
Here’s another fun example. This is Popov et al, 2017, sometimes known as “the Lego stacking paper”. The authors use a distributed version of DDPG to learn a grasping policy. The goal is to grasp the red block, and stack it on top of the blue block.
They got it to work, but they ran into a neat failure case. For the initial lifting motion, reward is given based on how high the red block is. This is defined by the z-coordinate of the bottom face of the block. One of the failure modes was that the policy learned to tip the red block over, instead of picking it up.
One way to address this is to make the reward sparse, by only giving positive reward after the robot stacks the block. Sometimes, this works, because the sparse reward is learnable. Often, it doesn’t, because the lack of positive reinforcement makes everything too difficult.
The other way to address this is to do careful reward shaping, adding new reward terms and tweaking coefficients of existing ones until the behaviors you want to learn fall out of the RL algorithm. It’s possible to fight RL on this front, but it’s a very unfulfilling fight. On occasion, it’s necessary, but I’ve never felt like I’ve learnt anything by doing it.
For reference, here is one of the reward functions from the Lego stacking paper.

In talks with other RL researchers, I’ve heard several anecdotes about the novel behavior they’ve seen from improperly defined rewards.
-
A coworker is teaching an
agent to navigate a room. The episode terminates if the agent
walks out of bounds. He didn’t add any penalty if the episode terminates this
way. The final policy learned to be suicidal, because negative reward was
plentiful, positive reward was too hard to achieve, and a quick death ending
in 0 reward was preferable to a long life that risked negative reward.
-
A friend is training a simulated robot arm to reach towards a point
above a table. It turns out the point was defined with respect to the table,
and the table wasn’t anchored to anything.
The policy learned to slam the table really hard, making the table fall
over, which moved the target point too. The target point just so happened
to fall next to the end of the arm.
-
A researcher gives a talk about using RL to train a simulated robot hand to
pick up a hammer and hammer in a nail. Initially, the reward was defined
by how far the nail was pushed into the hole. Instead of
picking up the hammer, the robot used its own limbs to punch the nail in.
So, they added a reward term to encourage picking up the hammer, and retrained
the policy.
They got the policy to pick up the hammer…but then it threw the hammer at the
nail instead of actually using it.
I know people who like to tell stories about paperclip optimizers. I get it, I really do. But honestly, I’m sick of hearing those stories, because they always speculate up some superhuman misaligned AGI to create a just-so story. There’s no reason to speculate that far when present-day examples happen all the time.
Even Given a Good Reward, Local Optima Can Be Hard To Escape
The previous examples of RL are sometimes called “reward hacking”. To me, this implies a clever, out-of-the-box solution that gives more reward than the intended answer of the reward function designer.Reward hacking is the exception. The much more common case is a poor local optima that comes from getting the exploration-exploitation trade-off wrong.
Here’s one of my favorite videos. This is an implementation of Normalized Advantage Function, learning on the HalfCheetah environment.
Here’s my best guess for what happened during learning.
- In random exploration, the policy found falling forward was better than standing still.
- It did so enough to “burn in” that behavior, so now it’s falling forward consistently.
- After falling forward, the policy learned that if it does a one-time application of a lot of force, it’ll do a backflip that gives a bit more reward.
- It explored the backflip enough to become confident this was a good idea, and now backflipping is burned into the policy.
- Once the policy is backflipping consistently, which is easier for the policy: learning to right itself and then run “the standard way”, or learning or figuring out how to move forward while lying on its back? I would guess the latter.
Here’s another failed run, this time on the Reacher environment.
These are both cases of the classic exploration-exploitation problem that has dogged reinforcement learning since time immemorial. Your data comes from your current policy. If your current policy explores too much you get junk data and learn nothing. Exploit too much and you burn-in behaviors that aren’t optimal.
There are several intuitively pleasing ideas for addressing this - intrinsic motivation, curiosity-driven exploration, count-based exploration, and so forth. Many of these approaches were first proposed in the 1980s or earlier, and several of them have been revisited with deep learning models. However, as far as I know, none of them work consistently across all environments. Sometimes they help, sometimes they don’t. It would be nice if there was an exploration trick that worked everywhere, but I’m skeptical a silver bullet of that caliber will be discovered anytime soon. Not because people aren’t trying, but because exploration-exploitation is really, really, really, really, really hard. To quote Wikipedia,
Originally considered by Allied scientists in World War II, it proved so intractable that, according to Peter Whittle, the problem was proposed to be dropped over Germany so that German scientists could also waste their time on it.
(Reference: Q-Learning for Bandit Problems, Duff 1995)
I’ve taken to imagining deep RL as a demon that’s
deliberately misinterpreting your reward and actively searching for the laziest
possible local optima. It’s a bit ridiculous, but I’ve found it’s actually a
productive mindset to have.Even When Deep RL Works, It May Just Be Overfitting to Weird Patterns In the Environment
Deep RL is popular because it’s the only area in ML where it’s socially acceptable to train on the test set.The upside of reinforcement learning is that if you want to do well in an environment, you’re free to overfit like crazy. The downside is that if you want to generalize to any other environment, you’re probably going to do poorly, because you overfit like crazy.
DQN can solve a lot of the Atari games, but it does so by focusing all of learning on a single goal - getting really good at one game. The final model won’t generalize to other games, because it hasn’t been trained that way. You can finetune a learned DQN to a new Atari game (see Progressive Neural Networks (Rusu et al, 2016)), but there’s no guarantee it’ll transfer and people usually don’t expect it to transfer. It’s not the wild success people see from pretrained ImageNet features.
To forestall some obvious comments: yes, in principle, training on a wide distribution of environments should make these issues go away. In some cases, you get such a distribution for free. An example is navigation, where you can sample goal locations randomly, and use universal value functions to generalize. (See Universal Value Function Approximators, Schaul et al, ICML 2015.) I find this work very promising, and I give more examples of this work later. However, I don’t think the generalization capabilities of deep RL are strong enough to handle a diverse set of tasks yet. Perception has gotten a lot better, but deep RL has yet to have its “ImageNet for control” moment. OpenAI Universe tried to spark this, but from what I heard, it was too difficult to solve, so not much got done.
Until we have that kind of generalization moment, we’re stuck with policies that can be surprisingly narrow in scope. As an example of this (and as an opportunity to poke fun at some of my own work), consider Can Deep RL Solve Erdos-Selfridge-Spencer Games? (Raghu et al, 2017). We studied a toy 2-player combinatorial game, where there’s a closed-form analytic solution for optimal play. In one of our first experiments, we fixed player 1’s behavior, then trained player 2 with RL. By doing this, you can treat player 1’s actions as part of the environment. By training player 2 against the optimal player 1, we showed RL could reach high performance. But when we deployed the same policy against a non-optimal player 1, its performance dropped, because it didn’t generalize to non-optimal opponents.
Lanctot et al, NIPS 2017 showed a similar result. Here, there are two agents playing laser tag. The agents are trained with multiagent reinforcement learning. To test generalization, they run the training with 5 random seeds. Here’s a video of agents that have been trained against one another.
Spoiler alert: they don’t.
That being said, there are some neat results from competitive self-play environments that seem to contradict this. OpenAI has a nice blog post of some of their work in this space. Self-play is also an important part of both AlphaGo and AlphaZero. My intuition is that if your agents are learning at the same pace, they can continually challenge each other and speed up each other’s learning, but if one of them learns much faster, it exploits the weaker player too much and overfits. As you relax from symmetric self-play to general multiagent settings, it gets harder to ensure learning happens at the same speed.
Even Ignoring Generalization Issues, The Final Results Can be Unstable and Hard to Reproduce
Almost every ML algorithm has hyperparameters, which influence the behavior of the learning system. Often, these are picked by hand, or by random search.Supervised learning is stable. Fixed dataset, ground truth targets. If you change the hyperparameters a little bit, your performance won’t change that much. Not all hyperparameters perform well, but with all the empirical tricks discovered over the years, many hyperparams will show signs of life during training. These signs of life are super important, because they tell you that you’re on the right track, you’re doing something reasonable, and it’s worth investing more time.
Currently, deep RL isn’t stable at all, and it’s just hugely annoying for research.
When I started working at Google Brain, one of the first things I did was implement the algorithm from the Normalized Advantage Function paper. I figured it would only take me about 2-3 weeks. I had several things going for me: some familiarity with Theano (which transferred to TensorFlow well), some deep RL experience, and the first author of the NAF paper was interning at Brain, so I could bug him with questions.
It ended up taking me 6 weeks to reproduce results, thanks to several software bugs. The question is, why did it take so long to find these bugs?
To answer this, let’s consider the simplest continuous control task in OpenAI Gym: the Pendulum task. In this task, there’s a pendulum, anchored at a point, with gravity acting on the pendulum. The input state is 3-dimensional. The action space is 1-dimensional, the amount of torque to apply. The goal is to balance the pendulum perfectly straight up.
This is a tiny problem, and it’s made even easier by a well shaped reward. Reward is defined by the angle of the pendulum. Actions bringing the pendulum closer to the vertical not only give reward, they give increasing reward. The reward landscape is basically concave.
Below is a video of a policy that mostly works. Although the policy doesn’t balance straight up, it outputs the exact torque needed to counteract gravity.
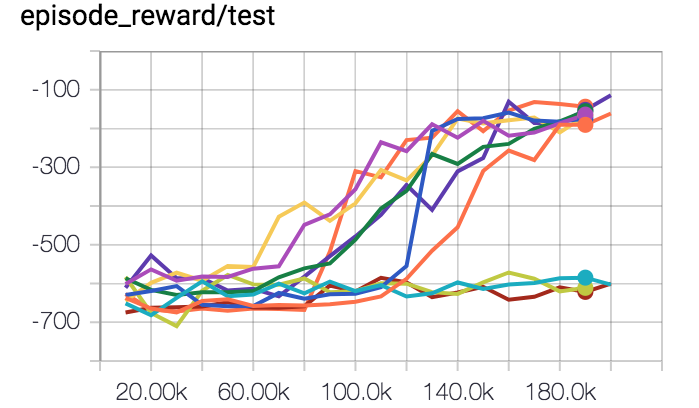
Seven of these runs worked. Three of these runs didn’t. A 30% failure rate counts as working. Here’s another plot from some published work, “Variational Information Maximizing Exploration” (Houthooft et al, NIPS 2016). The environment is HalfCheetah. The reward is modified to be sparser, but the details aren’t too important. The y-axis is episode reward, the x-axis is number of timesteps, and the algorithm used is TRPO.
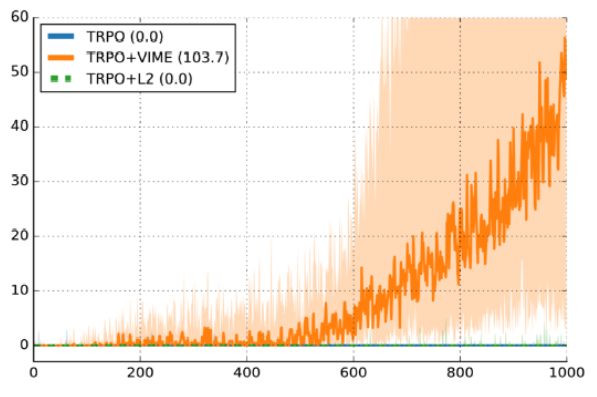
Look, there’s variance in supervised learning too, but it’s rarely this bad. If my supervised learning code failed to beat random chance 30% of the time, I’d have super high confidence there was a bug in data loading or training. If my reinforcement learning code does no better than random, I have no idea if it’s a bug, if my hyperparameters are bad, or if I simply got unlucky.
When your training algorithm is both sample inefficient and unstable, it heavily slows down your rate of productive research. Maybe it only takes 1 million steps. But when you multiply that by 5 random seeds, and then multiply that with hyperparam tuning, you need an exploding amount of compute to test hypotheses effectively.
If it makes you feel any better, I’ve been doing this for a while and it took me last ~6 weeks to get a from-scratch policy gradients implementation to work 50% of the time on a bunch of RL problems. And I also have a GPU cluster available to me, and a number of friends I get lunch with every day who’ve been in the area for the last few years.Instability to random seed is like a canary in a coal mine. If pure randomness is enough to lead to this much variance between runs, imagine how much an actual difference in the code could make.
Also, what we know about good CNN design from supervised learning land doesn’t seem to apply to reinforcement learning land, because you’re mostly bottlenecked by credit assignment / supervision bitrate, not by a lack of a powerful representation. Your ResNets, batchnorms, or very deep networks have no power here.
[Supervised learning] wants to work. Even if you screw something up you’ll usually get something non-random back. RL must be forced to work. If you screw something up or don’t tune something well enough you’re exceedingly likely to get a policy that is even worse than random. And even if it’s all well tuned you’ll get a bad policy 30% of the time, just because.
Long story short your failure is more due to the difficulty of deep RL, and much less due to the difficulty of “designing neural networks”.
Luckily, we don’t have to imagine, because this was inspected by the paper “Deep Reinforcement Learning That Matters” (Henderson et al, AAAI 2018). Among its conclusions are:
- Multiplying the reward by a constant can cause significant differences in performance.
- Five random seeds (a common reporting metric) may not be enough to argue significant results, since with careful selection you can get non-overlapping confidence intervals.
- Different implementations of the same algorithm have different performance on the same task, even when the same hyperparameters are used.
But What About All The Great Things Deep RL Has Done For Us?
Deep reinforcement learning has certainly done some very cool things. DQN is old news now, but was absolutely nuts at the time. A single model was able to learn directly from raw pixels, without tuning for each game individually. And AlphaGo and AlphaZero continue to be very impressive achievements.However, outside of these successes, it’s hard to find cases where deep RL has created practical real world value.
I tried to think of real-world, productionized uses of deep RL, and it was surprisingly difficult. I expected to find something in recommendation systems, but I believe those are still dominated by collaborative filtering and contextual bandits.
In the end, the best I could find were two Google projects: reducing data center power usage, and the recently announced AutoML Vision effort. Jack Clark from OpenAI tweeted a similar request and found a similar conclusion. (The tweet is from last year, before AutoML was announced.)
I know Audi’s doing something with deep RL, since they demoed a self-driving RC car at NIPS and said it used deep RL. I know there’s some neat work optimizing device placement for large Tensorflow graphs (Mirhoseini et al, ICML 2017). Salesforce has their text summarization model, which worked if you massaged the RL carefully enough. Finance companies are surely experimenting with RL as we speak, but so far there’s no definitive proof. (Of course, finance companies have reasons to be cagey about how they play the market, so perhaps the evidence there is never going to be strong.) Facebook’s been doing some neat work with deep RL for chatbots and conversation. Every Internet company ever has probably thought about adding RL to their ad-serving model, but if anyone’s done it, they’ve kept quiet about it.
The way I see it, either deep RL is still a research topic that isn’t robust enough for widespread use, or it’s usable and the people who’ve gotten it to work aren’t publicizing it. I think the former is more likely.
If you came to me with an image classification problem, I’d point you to pretrained ImageNet models, and they’d probably do great. We’re in a world where the people behind Silicon Valley can build a real Not Hotdog app as a joke. I have trouble seeing the same happen with deep RL.
Given Current Limitations, When Could Deep RL Work For Me?
A priori, it’s really hard to say. The problem with trying to solve everything with RL is that you’re trying to solve several very different environments with the same approach. It’s only natural that it won’t work all the time.That being said, we can draw conclusions from the current list of deep reinforcement learning successes. These are projects where deep RL either learns some qualitatively impressive behavior, or it learns something better than comparable prior work. (Admittedly, this is a very subjective criteria.)
Here’s my list so far.
- Things mentioned in the previous sections: DQN, AlphaGo, AlphaZero, the parkour bot, reducing power center usage, and AutoML with Neural Architecture Search.
- OpenAI’s Dota 2 1v1 Shadow Fiend bot, which beat top pro players in a simplified duel setting.
- A Super Smash Brothers Melee bot that can beat pro players at 1v1 Falcon dittos. (Firoiu et al, 2017).
From this list, we can identify common properties that make learning easier. None of the properties below are required for learning, but satisfying more of them is definitively better.
-
It is easy to generate near unbounded amounts of experience.
It should be clear why this helps. The more data you have, the easier the learning
problem is. This applies to
Atari, Go, Chess, Shogi, and the simulated environments for the parkour bot.
It likely applies to the power center project too, because
in prior work (Gao, 2014),
it was shown that neural nets can predict energy efficiency with high
accuracy. That’s exactly the kind of simulated model you’d want for training an
RL system.
It might apply to the Dota 2 and SSBM work, but it depends on the throughput of how quickly the games can be run, and how many machines were available to run them.
-
The problem is simplified into an easier form. One of the common errors
I’ve seen in deep RL is to dream too big. Reinforcement learning can do
anything! That doesn’t mean you have to do everything at once.
The OpenAI Dota 2 bot only played the early game, only played Shadow Fiend against Shadow Fiend in a 1v1 laning setting, used hardcoded item builds, and presumably called the Dota 2 API to avoid having to solve perception. The SSBM bot acheived superhuman performance, but it was only in 1v1 games, with Captain Falcon only, on Battlefield only, in an infinite time match.
This isn’t a dig at either bot. Why work on a hard problem when you don’t even know the easier one is solvable? The broad trend of all research is to demonstrate the smallest proof-of-concept first and generalize it later. OpenAI is extending their Dota 2 work, and there’s ongoing work to extend the SSBM bot to other characters.
-
There is a way to introduce self-play into learning. This is a component
of AlphaGo, AlphaZero, the Dota 2 Shadow Fiend bot, and the SSBM Falcon bot. I
should note that by self-play, I mean exactly the setting where the game is
competitive, and both players can be controlled by the same agent. So far,
that setting seems to have the most stable and well-performing behavior.
-
There’s a clean way to define a learnable, ungameable reward. Two player games
have this: +1 for a win, -1 for a loss. The original neural architecture search paper from Zoph et al, ICLR 2017 had this: validation accuracy of
the trained model. Any time you introduce reward shaping, you introduce a chance
for learning a non-optimal policy that optimizes the wrong objective.
If you’re interested in further reading on what makes a good reward, a good search term is “proper scoring rule”. See this Terrence Tao blog post for an approachable example.
As for learnability, I have no advice besides trying it out to see if it works.
-
If the reward has to be shaped, it should at least be rich.
In Dota 2, reward can come from last hits (triggers after every monster kill
by either player), and health (triggers after every attack or skill that
hits a target.) These reward signals
come quick and often. For the SSBM bot, reward can be given for damage dealt
and taken, which gives signal for every attack that successfully lands. The shorter
the delay between action and consequence, the faster the feedback loop gets
closed, and the easier it is for reinforcement learning to figure out a path to high reward.
A Case Study: Neural Architecture Search
We can combine a few of the principles to analyze the success of Neural Architecture Search. According to the initial ICLR 2017 version, after 12800 examples, deep RL was able to design state-of-the art neural net architectures. Admittedly, each example required training a neural net to convergence, but this is still very sample efficient.As mentioned above, the reward is validation accuracy. This is a very rich reward signal - if a neural net design decision only increases accuracy from 70% to 71%, RL will still pick up on this. Additionally, there’s evidence that hyperparameters in deep learning are close to linearly independent. (This was empirically shown in Hyperparameter Optimization: A Spectral Approach (Hazan et al, 2017) - a summary by me is here if interested.) NAS isn’t exactly tuning hyperparameters, but I think it’s reasonable that neural net design decisions would act similarly. This is good news for learning, because the correlations between decision and performance are strong. Finally, not only is the reward rich, it’s actually what we care about when we train models.
The combination of all these points helps me understand why it “only” takes about 12800 trained networks to learn a better one, compared to the millions of examples needed in other environments. Several parts of the problem are all pushing in RL’s favor.
Overall, success stories this strong are still the exception, not the rule. Many things have to go right for reinforcement learning to be a plausible solution, and even then, it’s not a free ride to make that solution happen.
In short: deep RL is currently not a plug-and-play technology.
Looking to The Future
There’s an old saying - every researcher learns how to hate their area of study. The trick is that researchers will press on despite this, because they like the problems too much.That’s roughly how I feel about deep reinforcement learning. Despite my reservations, I think people absolutely should be throwing RL at different problems, including ones where it probably shouldn’t work. How else are we supposed to make RL better?
I see no reason why deep RL couldn’t work, given more time. Several very interesting things are going to happen when deep RL is robust enough for wider use. The question is how it’ll get there.
Below, I’ve listed some futures I find plausible. For the futures based on further research, I’ve provided citations to relevant papers in those research areas.
Local optima are good enough: It would be very arrogant to claim humans are globally optimal at anything. I would guess we’re juuuuust good enough to get to civilization stage, compared to any other species. In the same vein, an RL solution doesn’t have to achieve a global optima, as long as its local optima is better than the human baseline.
Hardware solves everything: I know some people who believe that the most influential thing that can be done for AI is simply scaling up hardware. Personally, I’m skeptical that hardware will fix everything, but it’s certainly going to be important. The faster you can run things, the less you care about sample inefficiency, and the easier it is to brute-force your way past exploration problems.
Add more learning signal: Sparse rewards are hard to learn because you get very little information about what thing help you. It’s possible we can either hallucinate positive rewards (Hindsight Experience Replay, Andrychowicz et al, NIPS 2017), define auxiliary tasks (UNREAL, Jaderberg et al, NIPS 2016), or bootstrap with self-supervised learning to build good world model. Adding more cherries to the cake, so to speak.
Model-based learning unlocks sample efficiency: Here’s how I describe model-based RL: “Everyone wants to do it, not many people know how.” In principle, a good model fixes a bunch of problems. As seen in AlphaGo, having a model at all makes it much easier to learn a good solution. Good world models will transfer well to new tasks, and rollouts of the world model let you imagine new experience. From what I’ve seen, model-based approaches use fewer samples as well.
The problem is that learning good models is hard. My impression is that low-dimensional state models work sometimes, and image models are usually too hard. But, if this gets easier, some interesting things could happen.
Dyna (Sutton, 1991) and Dyna-2 (Silver et al., ICML 2008) are classical papers in this space. For papers combining model-based learning with deep nets, I would recommend a few recent papers from the Berkeley robotics labs: Neural Network Dynamics for Model-Based Deep RL with Model-Free Fine-Tuning (Nagabandi et al, 2017, Self-Supervised Visual Planning with Temporal Skip Connections (Ebert et al, CoRL 2017), Combining Model-Based and Model-Free Updates for Trajectory-Centric Reinforcement Learning (Chebotar et al, ICML 2017). Deep Spatial Autoencoders for Visuomotor Learning (Finn et al, ICRA 2016), and Guided Policy Search (Levine et al, JMLR 2016).
Use reinforcement learning just as the fine-tuning step: The first AlphaGo paper started with supervised learning, and then did RL fine-tuning on top of it. This is a nice recipe, since it lets you use a faster-but-less-powerful method to speed up initial learning. It’s worked in other contexts - see Sequence Tutor (Jaques et al, ICML 2017). You can view this as starting the RL process with a reasonable prior, instead of a random one, where the problem of learning the prior is offloaded to some other approach.
Reward functions could be learnable: The promise of ML is that we can use data to learn things that are better than human design. If reward function design is so hard, Why not apply this to learn better reward functions? Imitation learning and inverse reinforcement learning are both rich fields that have shown reward functions can be implicitly defined by human demonstrations or human ratings.
For famous papers in inverse RL and imitation learning, see Algorithms for Inverse Reinforcement Learning (Ng and Russell, ICML 2000), Apprenticeship Learning via Inverse Reinforcement Learning (Abbeel and Ng, ICML 2004), and DAgger (Ross, Gordon, and Bagnell, AISTATS 2011).
For recent work scaling these ideas to deep learning, see Guided Cost Learning (Finn et al, ICML 2016), Time-Constrastive Networks (Sermanet et al, 2017), and Learning From Human Preferences (Christiano et al, NIPS 2017). (The Human Preferences paper in particular showed that a reward learned from human ratings was actually better-shaped for learning than the original hardcoded reward, which is a neat practical result.)
For longer term work that doesn’t use deep learning, I liked Inverse Reward Design (Hadfield-Menell et al, NIPS 2017) and Learning Robot Objectives from Physical Human Interaction (Bajcsy et al, CoRL 2017).
Transfer learning saves the day: The promise of transfer learning is that you can leverage knowledge from previous tasks to speed up learning of new ones. I think this is absolutely the future, when task learning is robust enough to solve several disparate tasks. It’s hard to do transfer learning if you can’t learn at all, and given task A and task B, it can be very hard to predict whether A transfers to B. In my experience, it’s either super obvious, or super unclear, and even the super obvious cases aren’t trivial to get working.
Universal Value Function Approximators (Schaul et al, ICML 2015), Distral (Whye Teh et al, NIPS 2017), and Overcoming Catastrophic Forgetting (Kirkpatrick et al, PNAS 2017) are recent works in this direction. For older work, consider reading Horde (Sutton et al, AAMAS 2011).
Robotics in particular has had lots of progress in sim-to-real transfer (transfer learning between a simulated version of a task and the real task). See Domain Randomization (Tobin et al, IROS 2017), Sim-to-Real Robot Learning with Progressive Nets (Rusu et al, CoRL 2017), and GraspGAN (Bousmalis et al, 2017). (Disclaimer: I worked on GraspGAN.)
Good priors could heavily reduce learning time: This is closely tied to several of the previous points. In one view, transfer learning is about using past experience to build a good prior for learning other tasks. RL algorithms are designed to apply to any Markov Decision Process, which is where the pain of generality comes in. If we accept that our solutions will only perform well on a small section of environments, we should be able to leverage shared structure to solve those environments in an efficient way.
One point Pieter Abbeel likes to mention in his talks is that deep RL only needs to solve tasks that we expect to need in the real world. I agree it makes a lot of sense. There should exist a real-world prior that lets us quickly learn new real-world tasks, at the cost of slower learning on non-realistic tasks, but that’s a perfectly acceptable trade-off.
The difficulty is that such a real-world prior will be very hard to design. However, I think there’s a good chance it won’t be impossible. Personally, I’m excited by the recent work in metalearning, since it provides a data-driven way to generate reasonable priors. For example, if I wanted to use RL to do warehouse navigation, I’d get pretty curious about using metalearning to learn a good navigation prior, and then fine-tuning the prior for the specific warehouse the robot will be deployed in. This very much seems like the future, and the question is whether metalearning will get there or not.
A summary of recent learning-to-learn work can be found in this post from BAIR (Berkeley AI Research).
Harder environments could paradoxically be easier: One of the big lessons from the DeepMind parkour paper is that if you make your task very difficult by adding several task variations, you can actually make the learning easier, because the policy cannot overfit to any one setting without losing performance on all the other settings. We’ve seen a similar thing in the domain randomization papers, and even back to ImageNet: models trained on ImageNet will generalize way better than ones trained on CIFAR-100. As I said above, maybe we’re just an “ImageNet for control” away from making RL considerably more generic.
Environment wise, there are a lot of options. OpenAI Gym easily has the most traction, but there’s also the Arcade Learning Environment, Roboschool, DeepMind Lab, the DeepMind Control Suite, and ELF.
Finally, although it’s unsatisfying from a research perspective, the empirical issues of deep RL may not matter for practical purposes. As a hypothetical example, suppose a finance company is using deep RL. They train a trading agent based on past data from the US stock market, using 3 random seeds. In live A/B testing, one gives 2% less revenue, one performs the same, and one gives 2% more revenue. In that hypothetical, reproducibility doesn’t matter - you deploy the model with 2% more revenue and celebrate. Similarly, it doesn’t matter that the trading agent may only perform well in the United States - if it generalizes poorly to the worldwide market, just don’t deploy it there. There is a large gap between doing something extraordinary and making that extraordinary success reproducible, and maybe it’s worth focusing on the former first.
Where We Are Now
In many ways, I find myself annoyed with the current state of deep RL. And yet, it’s attracted some of the strongest research interest I’ve ever seen. My feelings are best summarized by a mindset Andrew Ng mentioned in his Nuts and Bolts of Applying Deep Learning talk - a lot of short-term pessimism, balanced by even more long-term optimism. Deep RL is a bit messy right now, but I still believe in where it could be.That being said, the next time someone asks me whether reinforcement learning can solve their problem, I’m still going to tell them that no, it can’t. But I’ll also tell them to ask me again in a few years. By then, maybe it can.
No comments:
Post a Comment